Also called the Radial Basis Function (RBF) kernel. Defined as . The implicit feature map is infinite-dimensional, so we could never compute it explicitly — but with the kernel trick we don’t have to. Its expressiveness and lack of strong assumptions make it the default kernel for non-linear SVMs.
Definition
The output decays from (when ) towards (as the distance grows). The bandwidth controls how quickly: small → sharp peak (only very close points are similar); large → broad peak (more points contribute).
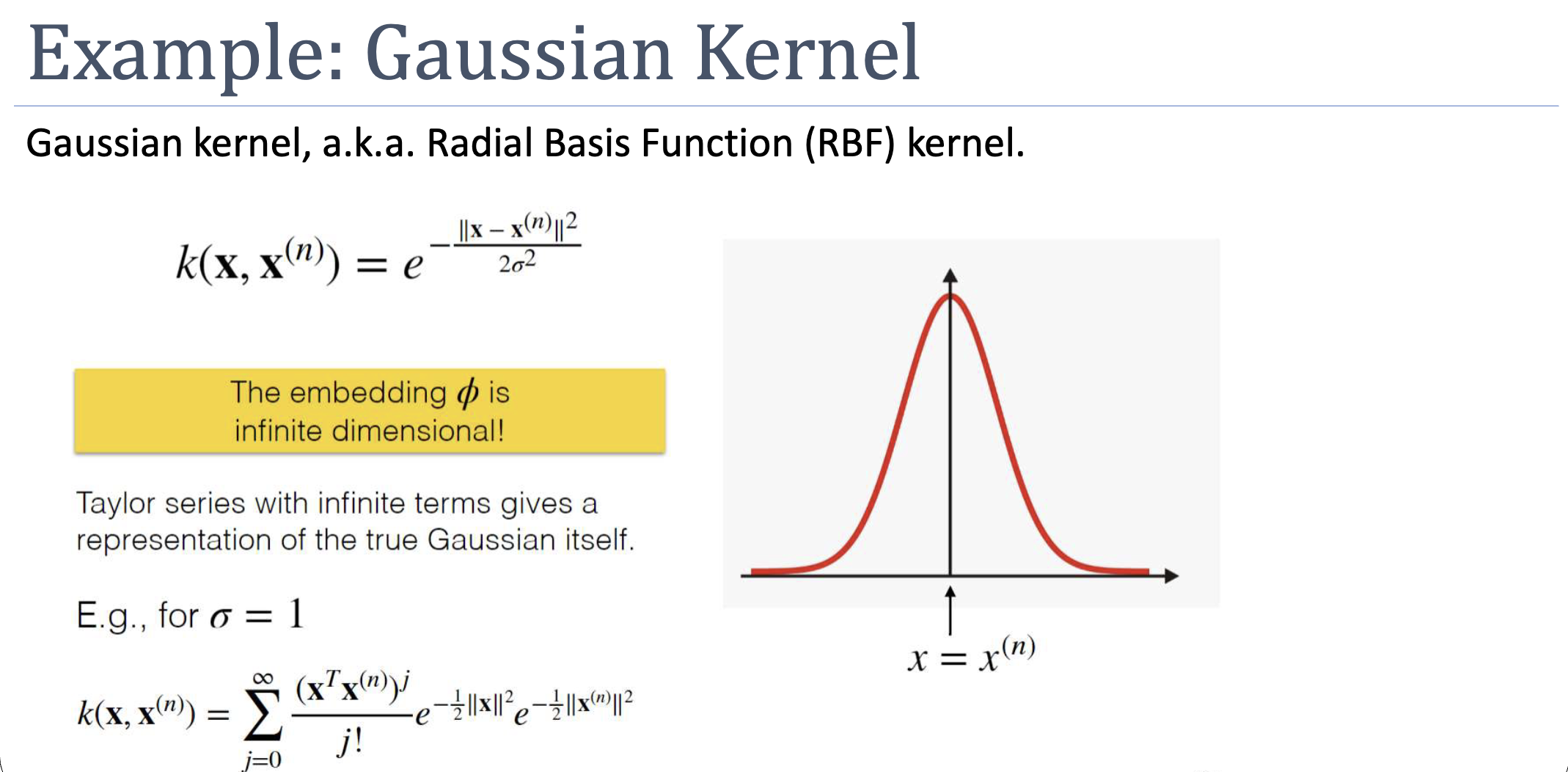
Why It’s Infinite-Dimensional
Expand the kernel as a Taylor series:
Each term corresponds to a polynomial kernel of degree , which has its own finite-dimensional embedding. The Gaussian kernel is an infinite weighted sum of all of them — its embedding has one dimension per monomial of every degree, infinitely many. The kernel computation, of course, is just one exponential.
Validity (Sketch of Mercer Proof)
Starting from the linear kernel (valid by inspection: ), apply composition rules:
- is valid (rule: polynomial with non-negative coefficients).
- is valid (rule: exponential of a kernel; or rule: sum of valid kernels).
- Multiply by with — still valid (rule: ).
The result is exactly (taking for brevity).
Practical Behaviour
- Default for non-linear SVM. Used when no domain-specific structure suggests a different kernel.
- Sensitive to . Too small → kernel sees only nearest neighbours, behaves like 1-NN, overfits. Too large → kernel is nearly constant, every point looks similar to every other, underfits. Cross-validate.
- Sensitive to feature scaling. Distances dominate by the largest-scale feature. Standardise inputs first.
- Universal approximator. With enough support vectors and the right , the Gaussian-kernel SVM can approximate any decision boundary — at the cost of greater overfitting risk.
On Real Data
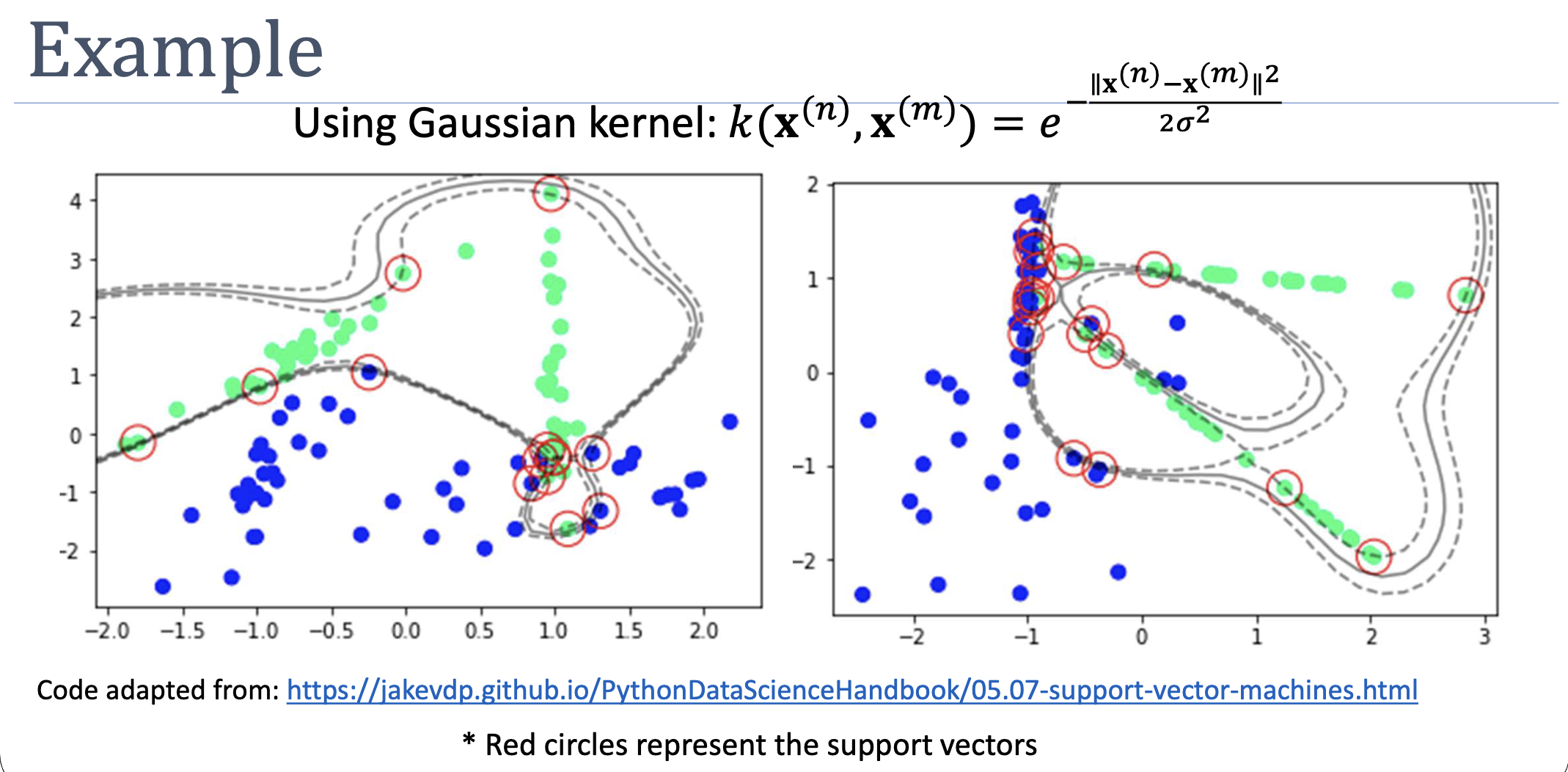
Two non-separable point clouds with a Gaussian-kernel SVM. The kernel produces curved, multi-modal boundaries that linear or low-degree-polynomial kernels can’t reach; support vectors (red circles) cluster near the boundary as expected.
Connection to Local Methods
The decision function is a weighted combination of bumps, one per support vector. In that sense, RBF SVM is structurally similar to a parametric form of kernel density classification: it asks how close the test point is to each support vector, weighted by class label and learned multiplier. Locality is built in.
Active Recall
The Gaussian kernel's embedding is infinite-dimensional, while the polynomial kernel's is finite. What does this mean in practice for the kinds of decision boundaries each can produce?
A finite-dimensional embedding restricts the boundary to a hypersurface of a fixed functional form (e.g., polynomial of degree ). Infinite dimensionality means the boundary can take essentially any smooth shape — bumps, ridges, isolated islands of one class, you name it. This makes Gaussian-kernel SVMs much more flexible but also more prone to overfitting; polynomial kernels constrain the hypothesis space, which acts as a built-in regulariser if the polynomial degree matches the truth.
Why does the bandwidth have such a large impact on Gaussian-kernel SVM behaviour, given that we never compute the embedding?
Because is the only tunable parameter inside the kernel — it directly controls how quickly similarity drops with distance. Small means support vectors only “vote” near themselves, giving wiggly per-point boundaries (overfit). Large means support vectors “vote” everywhere, smoothing the boundary toward something nearly linear (underfit). It plays the role analogous to polynomial degree: a single dial that traces the bias-variance frontier.
Related
- kernel-trick — what makes the infinite-dimensional embedding tractable
- mercers-condition — what licenses calling this a kernel at all
- polynomial-kernel — finite-dimensional alternative; Gaussian = infinite-degree weighted polynomial
- support-vector-machine — the canonical algorithm Gaussian kernels are paired with